
FAQS + Основы
Согласно недавнему отчету HMS, в настоящее время Промышленный Ethernet занимает 59% мирового рынка всех промышленных сетей. Здесь мы рассмотрим две наиболее известные промышленные сети Ethernet - EtherNet / IP и EtherCAT - и сравним сильные и слабые стороны каждой из них.
EtherNet/IP
Согласно Ассоциации Open DeviceNet Vendors, EtherNet / IP - это «имя, данное Общепромышленному протоколу (CIP), реализованному по стандарту Ethernet (IEEE 802.3 и набор протоколов TCP / IP)». Он был разработан для приложений промышленной автоматизации и управления процессами компанией Allen-Bradley (ныне Rockwell Automation) и был выпущен в 2001 году. Несмотря на то, что он в основном поставляется Rockwell Automation, скорость его внедрения является самой высокой среди всех сетей Промышленного Ethernet, и, по оценкам, составляет 15 % рыночной доли.
Ассоциация Open DeviceNet Vendors (ODVA) - это международная ассоциация, управляющая EtherNet / IP и CIP.
Следуя Стандартному программному обеспечению / Стандартной архитектуре Ethernet, EtherNet / IP использует физический, канальный, сетевой и транспортный уровни стандартного Ethernet с Общепромышленным протоколом (CIP) по TCP / IP и UDP. Он уникален как единственный промышленный протокол Ethernet, полностью основанный на стандартах Ethernet. Это означает, что EtherNet / IP использует то же оборудование, что и стандартные сети Ethernet, что делает его легкодоступным, недорогим и привычным для ИТ-персонала.
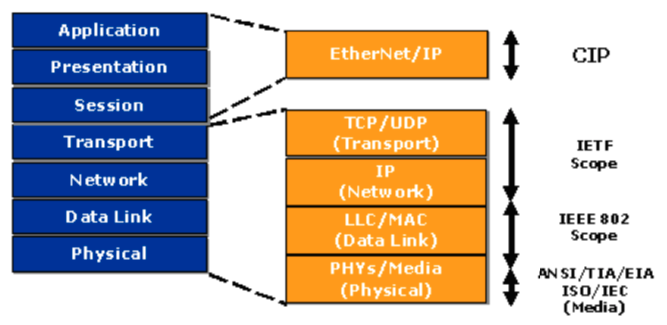
EtherNet / IP использует нижние уровни стандартного Ethernet с Общепромышленным протоколом (CIP) поверх транспортного уровня TCP / IP.
Изображение предоставлено: ODVA
EtherNet / IP определяет два типа связи: явная, которая используется для необходимых данных, таких как информация, и неявная, которая используется для данных, которые необходимо отправлять в режиме реального времени. Явные сообщения передаются через TCP, в то время как неявные (которые требуют высокой скорости и низкой задержки) отправляются через UDP. Неявные сообщения могут использовать модель производитель-потребитель.В этой модели сообщение передается один раз, независимо от количества потребителей, и используется одновременно многими узлами (устройствами) в сети (метод, называемый многоадресной связью). Модель производитель-потребитель обеспечивает эффективное использование пропускной способности сети и более высокую общую скорость, особенно когда нескольким потребителям необходимо получать одни и те же данные от производителя.
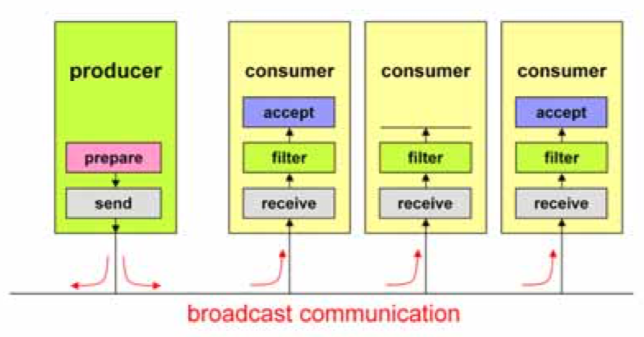
В модели связи производитель-потребитель данные передаются от производителя только один раз, и каждый потребитель фильтрует и получает только данные, предназначенные для него.
Изображение предоставлено: EtherCAT Technology Group
Несмотря на свою стандартизацию и высокоскоростную передачу данных, EtherNet / IP по своей природе не обеспечивает производительность в реальном времени, и не гарантирует выполнение в течение определенного периода времени. Это связано с тем, что пакеты данных TCP / UDP / IP могут поступать в любое время в любом порядке с любого устройства. Таким образом, EtherNet / IP в своей базовой форме не является идеальным решением для задач синхронного управления движением.
Чтобы удовлетворить потребность в многоосном распределенном управлении движением, ODVA разработала несколько сетевых расширений, известных как CIP Motion и CIP Sync (для синхронизации часов между осями), которые позволяют EtherNet / IP обеспечивать детерминированный, в режиме реального времени, замкнуто-произвольную производительность в соответствии со стандартами Ethernet. Однако эти расширения увеличивают стоимость и сложность простой, в остальном, стандартной сетевой архитектуры.
Что такое CIP?
Общий промышленный протокол (CIP) является сетевым прикладным уровнем для приложений промышленной автоматизации в реальном времени. CIP определяет структуру объекта и передачу сообщений, позволяя получать доступ к различным устройствам, используя общий механизм. Каждое устройство в сети EtherNet / IP представляет собой последовательность значений данных, называемых атрибутами, которые группируются в наборы объектов.
CIP также используется в DeviceNet и ControlNet, поэтому они совместно с EtherNet / IP используют библиотеку объектов и профили устройств. Это обеспечивает совместимость по принципу «включай и работай» между устройствами разных производителей, а также обмен сообщениями, настройку и диагностику в режиме реального времени в одной сети без специального программного обеспечения.
EtherCAT
EtherCAT (Ethernet для технологии автоматизации управления), представленная в 2003 году, была разработана Beckhoff и теперь управляется технологической группой EtherCAT (ETG). Как и EtherNet / IP, EtherCAT построен на физическом уровне Ethernet. Но вместо использования TCP / IP для транспортировки и маршрутизации сообщений, EtherCAT использует подход «обработка на лету» (также называемый «общение на лету»).
При таком подходе владелец EtherCAT отправляет телеграмму (пакет данных), которая проходит через каждый узел или ведомое устройство (обычно это накопитель или устройство ввода-вывода). Уникальная особенность EtherCAT заключается в том, что сетевые ведомые устройства могут считывать или извлекать только необходимую информацию из сообщения, а также могут добавлять данные в сообщения до ее передачи следующему ведомому устройству. Сообщение проходит через все подключенные вспомогательные устройства и затем возвращается к владельцу.

С EtherCAT, сообщение отправляется от владельца ко всем ведомым (узлам). Каждый узел может читать данные, относящиеся к этому узлу, и может добавлять данные в сообщение, прежде чем она перейдет к следующему узлу.
Изображение предоставлено: RealPars B.V.
Чтение и запись в / из сообщения обеспечивается специальной ASIC на каждом ведомом устройстве EtherCAT. Этот аппаратный подход означает, что каждый подчиненный сервер вносит минимальную задержку в процесс, и конфликты невозможны. Сетевые команды в сети EtherCAT могут обрабатываться на скоростях, которые конкурируют со скоростями аналоговых систем.
EtherCAT хорошо подходит для синхронизированного многоосевого управления движением «за границами» и не требует дополнительного оборудования для синхронизации между несколькими осями. Однако количество устройств, которые можно подключить через EtherCAT, ограничено, и эта система имеет более высокую цену и меньшую стандартизацию, чем EtherNet / IP, что потенциально затрудняет интеграцию.